Coordinate systems
Cartesian $$\vec{\pu{ pos }} = (\vec{x}, \vec{y}, \vec{z})$$$$\vec{\dd s} = (\vec{\dd x}, \vec{\dd y}, \vec{\dd z})$$$$\dd V = \dd x \cdot\dd y \cdot \dd z$$
Constant unit vectors of global frame
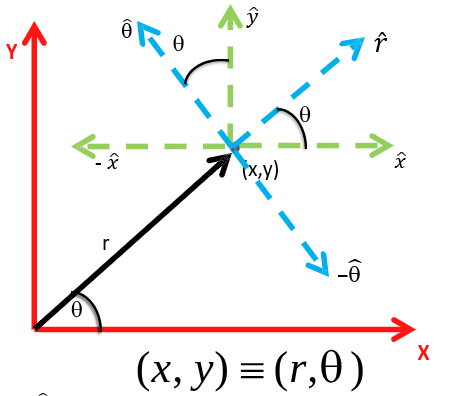
Polar $$\begin{align}\vec{\pu{ pos }} &= (\vec{r}, {\theta}, \vec{z}) \ \vec{r} &= |r|\hat{r} \ \hat{r} &= \hat{x}\cos \theta + \hat{y} \sin \theta \ \hat{\theta} &= -\hat{x}\sin \theta + \hat{y}\cos \theta\end{align}$$
We always require three independent variables for fully describing position.
Notice that
Trying to represent the magnitude of
Varying unit vectors, observer frame.
Since the unit vectors aren't constant, they have finite time-derivatives.
$$\begin{align} \dot{\hat{r}} &= \dot{\theta}\hat{\theta} \ \dot{\hat{\theta}} &= -\dot{\theta}\hat{r} \end{align}$$
Velocity and acceleration (2D)
Cartesian : $$\begin{align} \vec{v} &= \frac{dx}{dt}\hat{x} + \frac{dy}{dt}\hat{y} \ \ \vec{a} &= \frac{d^2x}{dt^2}\hat{x} + \frac{d^2y}{dt^2}\hat{y}\end{align}$$
Polar : $$\begin{align}\vec{v} &= \frac{d(|r|\hat{r})}{dt}\\implies \vec{v} &= \frac{d|r|}{dt}\hat{r} + |r| \frac{d\hat{r}}{dt} \\pu{ Since, } \ \frac{d\hat{r}}{dt} &= \frac{d\theta}{dt} \cdot \hat{\theta} \ \therefore\ \ \vec{v} &= \frac{d|r|}{dt}\hat{r} + |r| \frac{d\theta}{dt}\hat{\theta} \end{align}$$
Velocity : $$\boxed{ \vec{v} = \dot{r}\hat{r} + |r|\dot{\theta}\hat{\theta} }$$
Acceleration : $$\boxed{\vec{a} = \underbrace{ (\ddot{r} - r\dot{\theta}^2) \hat{r}}{\text{Linear + Centripetal}} + \underbrace{(r\ddot{\theta} + 2\dot{r}\dot{\theta})\hat{\theta}}{\text{Tangential + Coriolis}}}$$
Infinitesimal Line Element in plane polar
Change in position from
We consider motion in two mutually perpendicular directions
- Change in
, keeping constant
Contribution : - Change in
, keeping constant
Contribution :
Total line element $$\boxed{\vec{\dd l} = \dd r \cdot \hat{r} + r \dd \theta \cdot\hat{\theta}}$$
Area element $$\vec{A} = r \cdot\dd r \cdot\dd \theta \cdot\hat{n}$$
3D polar
Introduction of
Line element $$\boxed{\vec{\dd l} = \dd r \cdot \hat{r} + r \dd \theta \cdot\hat{\theta} + \dd z \cdot\hat{z} }$$
Area element $$\vec{A} = r \cdot\dd \theta \cdot \dd z \cdot \hat{r}$$
Volume element $$V = r\cdot\dd r\cdot\dd \theta \cdot \dd z$$
Spherical coordinate $$\begin{align} &(r, \theta, \phi) \ \ r &= \sqrt{ x^2 + y^2 + z^2 } \ \ z &= r\cos \theta \ \theta &= \tan^{-1} \left( \frac{\sqrt{ x^2 +y^2}}{z} \right) \ \phi &= \tan^{-1}\left( \frac{y}{x} \right)\end{align}$$
For unit vectors $$\begin{align} \hat{r} &= (\sin \theta \cos \phi) \cdot\hat{x} + (\sin \theta \sin \phi) \cdot \hat{y} + \cos \theta \cdot \hat{z} \ \hat{\theta} &= (\cos \theta \cos \phi)\cdot \hat{x} + (\cos \theta \sin \phi)\cdot \hat{y} - \sin \theta \cdot\hat{z} \ \hat{\phi} &= -\sin \phi \cdot \hat{x} + \cos \phi \cdot \hat{y} + 0\cdot \hat{z}\end{align}$$
In matrix form, which is easier to remember, $$\begin{align}\begin{bmatrix}\hat{r} \ \hat{\theta} \ \hat{\phi}\end{bmatrix} &= \begin{bmatrix}\sin \theta \cos \phi& \sin \theta \sin \phi & \cos \theta \ \cos \theta \cos \phi & \cos \theta \sin \phi & -\sin \theta \ -\sin \phi & \cos \phi & 0\end{bmatrix}\cdot\begin{bmatrix}\hat{x} \ \hat{y}\\hat{z}\end{bmatrix} \ \ \ \begin{bmatrix}\hat{x} \ \hat{y} \ \hat{z}\end{bmatrix} &= \begin{bmatrix}\sin \theta \cos \phi & \cos \theta \sin \phi & -\sin \phi \ \sin \theta \sin \phi & \cos \theta \sin \phi & \cos \phi \ \cos \theta & -\sin \theta & 0\end{bmatrix} \cdot \begin{bmatrix}\hat{r} \ \hat{\theta} \ \hat{\phi}\end{bmatrix} \end{align}$$
The respective derivatives are easy to find, and I am therefore omitting.
Line element $$\vec{\dd l} = \dd r\cdot \hat{r} + r \dd \theta \cdot \hat{\theta} + r\sin \theta \dd \phi \cdot \hat{\phi}$$
Area element $$\vec{\dd A} = (r^2\sin \theta\dd \theta \dd \phi)\cdot \hat{r}$$
Volume element $$\dd V = (r^2\sin \theta\ \dd r\ \dd \theta\ \dd \phi)\cdot \hat{r} $$
Conversion matrices
Between different coordinate systems